微机电系统(MEMS)
MEMS倾角仪测量原理倾角仪,又称倾斜传感器、测角仪或坡度传感器,它可在重力作用下,测量物体的角度。随着微机电系统(MEMS)制造技术的进步,MEMS传感器因其性能优异,性价比高的特性,开始大量进入市场。 这类倾角仪的基本原理是在完全定型的专用集成电路(ASIC)中内置一个微机电系统(MEMS)传感器单元。
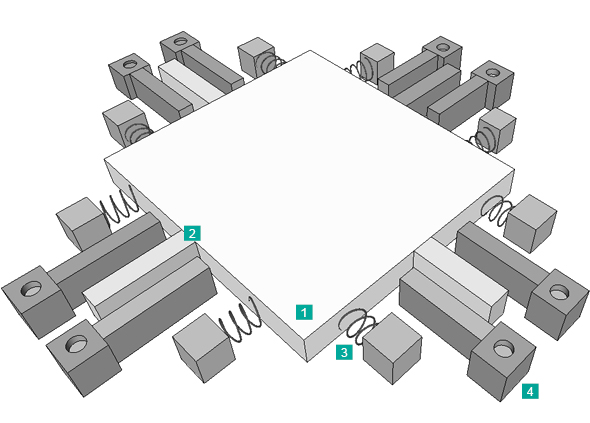
图 1:MEMS 传感器的原理
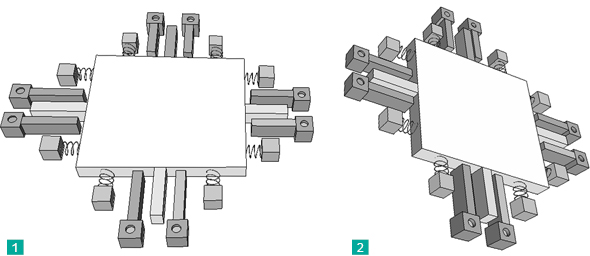
用一个有两个电极的简单模型就能轻而易举地解释MEMS 传感器的作用。简易模型中采用的电极一个为固定电极,而与弹簧元件相连的另一个为弹性电极(检测质量)(参照图1)。 当倾角仪处于水平位置时(请参阅图 2.1 ),测量电极间的相应电容量。如果传感器发生倾斜(请参阅图 2.2 ),弹性电极将改变它和固定电极的相对位置,而传感器单元所测量到的两个电极之间的电容量也相应发生改变。电容量的变化转换为相应的倾斜值。
图2: MEMS传感器的位置 处于水平位置的MEMS传感器
处于倾斜位置的MEMS传感器
MEMS加速计的工作原理与MEMS传感器的工作原理相类似,并且已经在许多工业和商业应用中得以验证,如手机的运动传感器和汽车安全气囊中。然而诸如此类的消费应用需要低品位加速单元,而这类加速计的其精确度往往不超过1度。与低品位消费倾角仪单元相反,TILTIX倾角仪MEMS传感器由一个精确的电极阵列构成,能改善测量的分辨率和精确度。 TILTIX系列倾角仪有两种型号的产品可供选择。一种产品为单轴型,其测量的倾斜角度在0-360°度(顺时针或逆时针)的范围内;另一种是双轴型,其测量的角度在 ± 80 °斜度范围内。
静态倾角仪的劣势如果有强烈的冲击或者震动,静态倾角仪中的物理阻尼可能不足以抑制外部的干扰。使用软件滤波方法过滤振动和冲击带来的干扰,只是很有限的减少这种干扰带来的影响。对于静态倾角仪,可以使用“平均”或“指数”滤波器,并将抖动的信号过滤位配置为平滑信号。但是,这种滤波之后的信号,会影响倾角仪的快速反应时间,传感器的响应速度变慢,造成数据信号输出滞后。 在生产过程中,人们采用标准测量来确定MEMS传感器的非线性关系, 并将这些非线性关系作为一套校准数据存储在传感器中。在操作过程, 博思特的动态倾角仪适用于加速度很大的工况,且有强烈振动或者强冲击的工作环境,博思特的动态倾角仪基于新研发的技术,此技术不同于静态倾角仪的工作原理,动态倾角仪没有物理阻尼,因此可以保证信号的稳定性,同时也保证了信号的实时性。
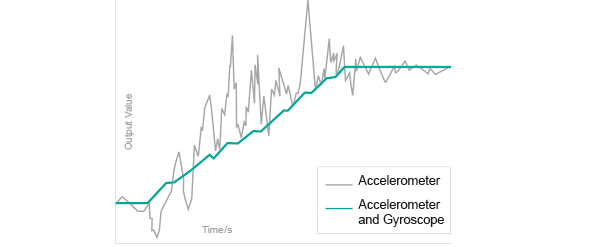
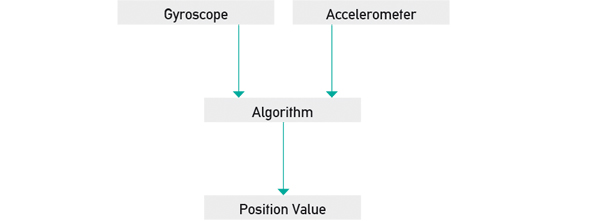
动态倾角仪对于突然运动的工况、或者有较强的冲击和振动的应用来说,具有快速响应和稳定信号输出的传感器是及其重要的。博思特的动态倾角仪结合了两种不同的MEMS传感器的测量原理:3D加速度传感器和3D陀螺仪。3D加速度传感器没有阻尼(与静态倾角仪的工作原理不同),可以反馈快速的运动状态。同时,3D陀螺仪根据惯量原理测量角速度。加速度计和陀螺仪的信号相组合,补偿由于加速度产生的影响。因此,动态倾角仪可以可靠地用于,工程机械、采矿设备、起重机等移动设备或机器人应用中。下图比较了,动态倾角仪和传统静态倾角仪,在受到强冲击和振动时,两种传感器动态运动时的输出性能。
移动挖掘机的倾角测量
创新性的算法带来可靠结果加速度计测量倾斜位置,而陀螺仪确定角速度。加速度对加速度计有很大的影响,但对陀螺仪的测量角速度只有很有限的影响。创新的算法结合了角速度和加速度两个信号,这样,传感器能够将实际位置与外部加速度引入的误差分开,获得信号的最佳值。
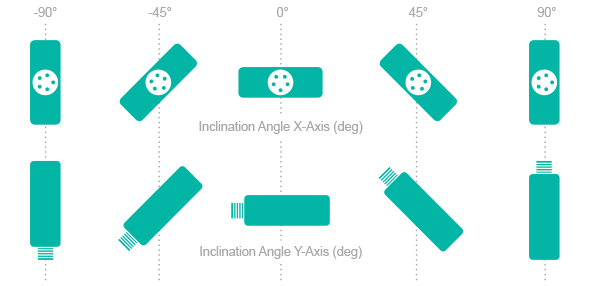
测量范围和安装事宜可选如下两种版本的倾角仪,单轴或者双轴
1. 用于水平安装的双轴传感器。双轴倾角传感器,输出一个是X轴,另一个是y轴。每个轴显示相对于水平面的倾斜角。
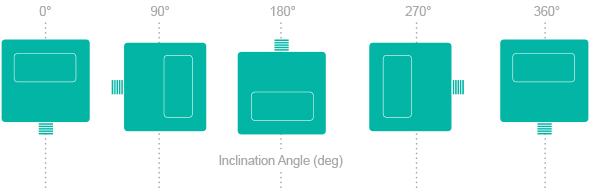
2. 单轴倾斜,用于垂直安装,测量单轴输出。
动态倾角仪的附加功能动态倾角仪的主要目的是提供稳定的倾角数据,而不需要配置其余复杂的参数。对于具有CANopen接口的动态测斜仪,也可以针对三个轴中的每一个轴,均可以反馈输出加速度(加速度计)和角速度(陀螺仪)。这些二外的数据,存储在可映射的CANopen对象字典地址中。 可以监控传感器输出的单轴或者多个轴的加速度,控制器侧即可以实现对附加功能的监控,达到更高的安全特性。当超过某一加速度阈值时,控制器可以停止机器运转。也可利用关于x轴的角速度,测量和监测机器的水平(偏航)旋转。取决于机器制造商或系统集成商来决定如何使用传感器的附加功能(加速度,角速度)。
MEMS传感器芯片的制作由于微电子机械系统(MEMS)制造技术的进步,这种类型的传感器已经是性价比很高的大规模市场产品。倾角仪中的基本测量元件MEMS传感器,完全嵌入在封装的ASIC中。
规格参数传感器周期时间: 传感器的内部的循环时间。5ms的周期时间意味着位置值每5ms更新一次。 接口周期时间: 通过通信接口传输位置值的周期时间。与传感器周期时间(固定值)相反,接口周期时间可以由用户通过Canopen协议容易地调整。 绝对精度: 绝对精度是传感器测量位置和实际位置之间的偏差。 偏移量: 当倾角仪位于零位时,输出将显示一个小的偏差。在零位的这个误差称为偏移误差。 动态精度: 动态精度取决于绝对精度,只是设备受到外部振动和加速度的影响。在模拟移动机械运动环境的不同设备上进行实验室试验,得以确定动态精度。所述动态精度作为参考值;我们建议您评估自己的应用工况上的动态精度,因为不同应用工况的振动和冲击不同。我们采用如下实验室数据,用下列设备进行: - 线性加速度:传感器在单轴上加速,速度为10米/秒,超过1s。
- 振动:不同振动频率在1-1000赫兹之间,力为1g
分辨率: 可以分辨的最小角度 滞后: 滞后的定义是系统的输出值,不仅取决于当前输入,还取决于过去的输入。对于倾角传感器,这意味着所测量的倾斜角度也依赖于过去的位置。倾角仪从0°倾斜到10°或从20°倾斜到10°,会有一个很小的差别。这种差异是由滞后现象产生的。 温度漂移: 这个值描述了测量的倾斜角度随温度变化的变化。如果倾角仪处于静止位置,并且温度降低或增加,则输出值也将根据温度漂移而变化。 设置时间: 这是一个描述系统动态行为的值。设置时间定义了倾角仪信号到达的实际位置所需要的时间,停留在实际位置的5%范围以内。
| 










 京公网安备 11010802022300号
京公网安备 11010802022300号